Hauptinhalt
Haptische und auditive Geometrie-Inspektion für blinde 3D-Modellierer

Kurzfassung
Programmiersprachen für konstruktive Festkörpergeometrie (engl. Constructive Solid Geometry), wie OpenSCAD, werden häufig von blinden 3D-Modellierern verwendet, da eine textbasierte Schnittstelle mit etablierten Technologien, wie Braillezeilen oder Sprachsynthesizern, für sie leicht zugänglich ist. Derzeit gibt es jedoch keine direkte Rückmeldung für blinde Benutzer, um ein erstelltes 3D-Modell auf Fehler zu überprüfen. Dies verhindert, dass sie unabhängig von der Unterstützung durch eine sehende Person arbeiten können. In diesem Projekt wird ein System vorgestellt, das blinden Modellierern eine audio-haptische Vorschau ihres 3D-Objekts mit einem kostengünstigen haptischen System bietet. Zunächst wird einen Basisansatz definiert, der dem Stand der Technik für ein audio-haptisches System repräsentiert und als "freier Modus" bezeichnet wird. Anschließend wird ein neuartiger "geführten Modus" vorgeschlagen, der den Endeffektor automatisch entlang der Kontur der orthografischen Projektion des 3D-Modells bewegt und die Wahrnehmung der absoluten Position auf der Kontur durch akustische Signale verbessert. In einer Benutzerstudie mit blinden Teilnehmern verbessert der neuartige "geführte Modus" die Identifizierung von 3D-Modellen um 34 Prozent im Vergleich zum Basissystem. Darüber hinaus enthalten 3D-Modelle, die mit unserem vollständigen audio-haptischem System erstellt wurden, deutlich weniger Fehler und werden im Durchschnitt um 28 Prozent besser bewertet als Modelle, die mit dem Basissystem erstellt wurden, und um 84 Prozent besser als Modelle ohne audio-haptische Vorschau.
Veröffentlichung

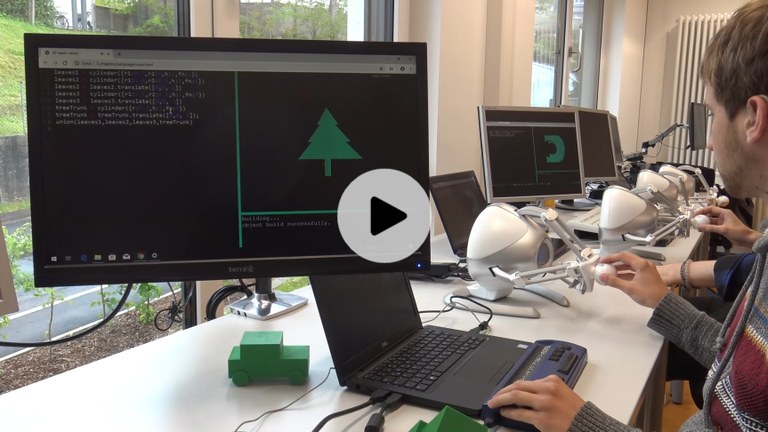
Video
Software
Die Software (Binärcode für Windows und Quellcode, MIT-Lizenz) für unser audio-haptisches 3D-Inspektionssystem steht hier zum Download zur Verfügung:
Wir haben die Anwendung mit dem günstigen Falcon Haptic Device getestet. Haptische Geräte anderer Hersteller funktionieren möglicherweise ebenfalls, wenn sie vom Force Dimension SDK unterstützt werden.
Die Software kann wie folgt installiert werden:
- Installieren Sie das neueste Force Dimension SDK von der Force Dimension Website
- Schließen Sie das haptische Gerät an
- Entzippen Sie den Ordner "HapticWorkStation" an den gewünschten Installationsort
- Führen Sie "HapticWorkStationInstaller.exe" aus
- Um die Anwendung zu starten, führen Sie "StartHapticChromeApp.bat" aus
Bitte kontaktieren Sie uns, falls Sie Problem mit der Software haben sollten.